PATCHES Namelist (Expert Options)
|
|
|
Result of running PAVE (left), VSA (middle), and METIS (right) on the ‘basic hemi’ enclosure. |
||
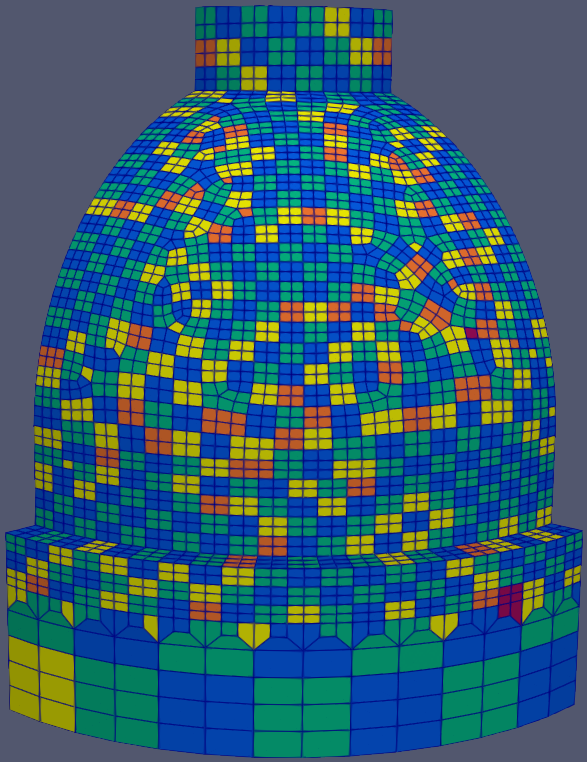
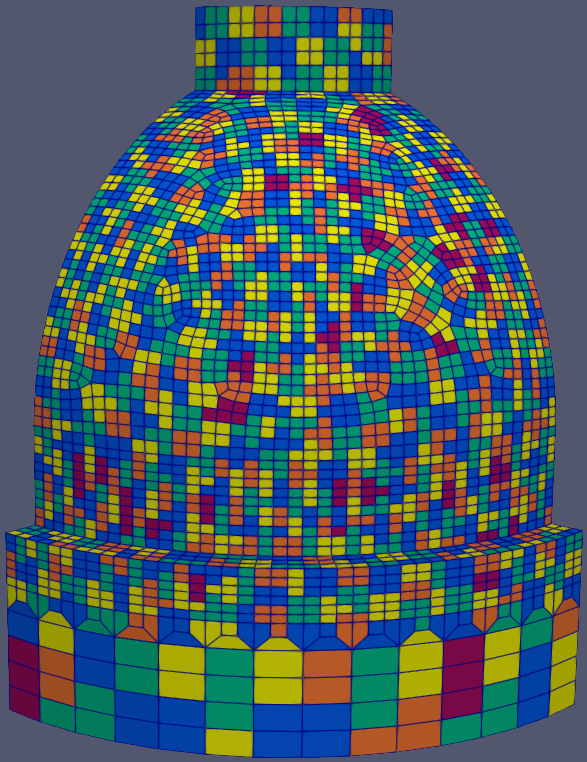
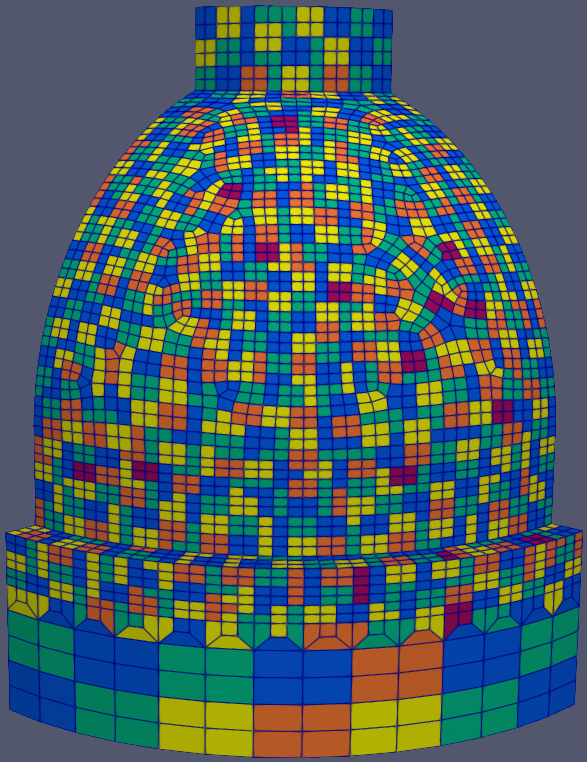
Genre supports multiple algorithms for patching, with different tradeoffs for performance and quality. These are expert parameters. Most users should not need more than the standard parameters.
-
Pros: produces neat tilings that account for patch planarity and irregularity. The algorithm is fast (linear in the number of faces).
Cons: uniform coarsening of the mesh. Only supports faces-per-patch ratios of roughly 4 or 6, depending on whether the mesh is hexahedral or tetrahedral.
-
Pros: works well for arbitrary faces-per-patch ratios. Provides flexible control of the geometric patch diameters. Maximizes patch planarity. Provides choice between patches with roughly the same number of faces, or roughly the same surface area.
Cons: can be extremely slow for large meshes (scales badly), due to a quadratic dependence on the number of faces. However, once computed, the result can be reused with the FILE method allowing experimentation with Chaparral parameters without rerunning the algorithm.
-
Pros: works well for arbitrary faces-per-patch ratios. The algorithm is fast by leveraging the METIS library. Provides choice between patches with roughly the same number of faces, or roughly the same surface area. In the second case, the constraint is tight, so the faces-per-patch ratio is largely ignored and need only be approximate.
Cons: New and not extensively tested. Patch planarity is not explicitly maximized, but at least patches will not straddle “sharp edges” (see here for more details). Note that it is not clear whether patch planarity, or lack thereof, affects the quality of the thermal radiation model.
-
Retained for developer use and not recommended for regular users. It has similar limitations to PAVE, but produces lower quality patches.
Refer to each algorithm’s documentation for extensive details on its properties, limitations, and supported inputs.
General Parameters
patch_algorithm
Selects one of the available algorithms, or disables patching.
- Type:
string
- Default:
'METIS'- Valid Values:
'NONE': No patches will be generated. All other parameters are ignored. This is equivalent to an absent PATCHES namelist.'PAVE': Generate patches with the PAVE algorithm.'VAC': Generate patches with the VAC algorithm.'VSA': Generate patches with the VSA algorithm.'METIS': Generate patches with the METIS algorithm.'FILE': Patches will be read from a file. Because the cost of computing patches can be quite substantial for very large enclosure meshes, this pseudo-algorithm is provided to enable the use of previously computed patches.
verbosity_level
Defines the verbosity level for all console output of the patch algorithm.
- Type:
integer
- Default:
1
- Valid Values:
0: Suppress all output.
1: Print a summary of the run when algorithm finishes.
>1: Print detailed run information, used for debugging.
max_angle
Defines the maximum allowable angle (in degrees) between adjacent faces.
- Type:
real
- Default:
20.0
- Valid Values:
[0, 180]
All the patch algorithms construct the adjacency matrix of the enclosure faces to efficiently determine which faces are adjacent to others. If the normals of two ‘topologically adjacent’ faces exceed max_angle, then the faces will not be neighbors in the internal adjacency matrix.
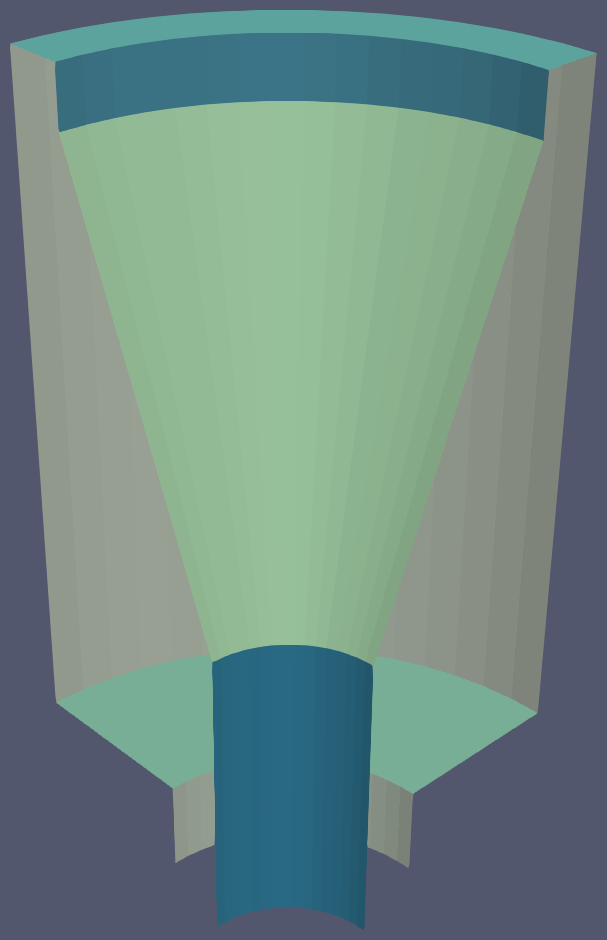
Figure 42.2.1 The connected components of the outer surface of a furnace funnel. MAX_ANGLE is set to 20 degrees. Each component is a different color. The face edges are omitted for clarity.
The patch algorithms guarantee that patches will be connected sets of faces.
Therefore, max_angle divides the enclosure into connected components of
faces wherever there are ‘sharp’ edges whose angle exceeds the parameter.
Patches will never span more than one component.
Note
max_angle only applies to pairs of adjacent faces, so two faces within a
patch may be at an angle greater than max_angle if the faces between them
are at sufficiently large angles. This is unlikely in practice, given a
reasonably smooth enclosure and small max_angle.
FILE Parameters
The following namelist parameter applies only to the FILE algorithm.
patch_file
The path to an existing radiation enclosure file containing patch information. The enclosure defined by the file must be identical to the current enclosure. This may be an absolute path or a relative path.
- Type:
case-sensitive string
- Valid Values:
must be a valid path
PAVE Parameters
The following namelist parameters apply only to the PAVE algorithm. For more information, refer to the PAVE algorithm documentation.
pave_merge_level
Controls the aggressiveness of patch merging. After paving is complete, there will be a valid patching of the enclosure. The algorithm then attempts to merge patches in order to reduce the patch count.
- Type:
integer
- Default:
3
- Valid Values:
0: No merging.
1: Merge patches that are within the faces of a vertex.
2: Same as 1. Additionally, merge patches that are within the faces of pairs of adjacent vertices. The old patches are requeued with their original weight so that a merge is only performed if the merge candidate has a lower weight than any of its consituent patches.
\(\geq 3\): Same as 2. Additionally, merge patches within the faces of pairs of adjacent vertices, but add a large weight to the requeued old patches. This ensures that the merge is always performed.
pave_split_patch_size
Defines the maximum size of patches to be split during patch merging.
- Type:
integer
- Default:
3
- Valid Values:
\(\gt 1\)
Before merging patches, all merge methods find patches with less
than pave_split_patch_size faces and ‘split’ them into 1-face patches. The
original patches aren’t actually modified, rather they are re-queued along with
their constituent faces. This allows the algorithm to find more merge candidates
and then ‘fill in the gaps’ with the 1-face patches.
The 1-face patches have a large weight, so they will only be used after all other patches are set. Therefore, the enclosure will tend retain the same patches as before the split, unless this is not possible due to a merge.
Note
For best results, set pave_split_patch_size to 3 for quadrilateral meshes
and to 5 for triangular meshes. This avoids splitting too many patches.
pave_random_seed
Defines the seed for the random number generator used to pick the initial seed patches.
- Type:
integer
- Default:
The seed is taken from the system clock.
- Valid Values:
\(\gt 0\)
The PAVE algorithm begins by creating a ‘seed patch’ in each connected component of the enclosure. Each component is then ‘paved’ or ‘tiled’ with patches, starting from the seed patch. The seed patches are chosen randomly from a set of patches determined to produce optimal results. Refer to the seed patches section of the PAVE documentation for more information on how the seed patches are selected.
This parameter sets the seed for the random number generator used to pick the seed patches. Therefore, runs with the same value for this parameter will produce identical results. If this parameter is not specified, then the seed is taken from the system clock and results will likely vary from run to run.
VAC Parameters
The following namelist parameters apply only to the VAC algorithm. For more information, refer to the VAC algorithm documentation.
vac_merge_level
Controls the aggressiveness of patch merging. After the main stage of the VAC algorithm, there will be a valid patching of the enclosure. The algorithm then attempts to merge patches in order to reduce the patch count.
- Type:
integer
- Default:
3
- Valid Values:
0: No merging.
1: Merge patches that are within the faces of a vertex.
2: Same as 1. Additionally, merge patches that are within the faces of pairs of adjacent vertices. The old patches are requeued with their original weight so that a merge is only performed if the merge candidate has a lower weight than any of its consituent patches.
\(\geq 3\): Same as 2. Additionally, merge patches within the faces of pairs of adjacent vertices, but add a large weight to the requeued old patches. This ensures that the merge is always performed.
vac_split_patch_size
Defines the maximum size of patches to be split during patch merging.
- Type:
integer
- Default:
3
- Valid Values:
\(\gt 1\)
Before merging patches, all merge methods find patches with less
than vac_split_patch_size faces and ‘split’ them into 1-face patches. The
original patches aren’t actually modified, rather they are re-queued along with
their constituent faces. This allows the algorithm to find more merge candidates
and then ‘fill in the gaps’ with the 1-face patches.
The 1-face patches have a large weight, so they will only be used after all other patches are set. Therefore, the enclosure will tend retain the same patches as before the split, unless this is not possible due to a merge.
Note
For best results, set vac_split_patch_size to 3 for quadrilateral meshes
and to 5 for triangular meshes. This avoids splitting too many patches.
VSA Parameters
The following namelist parameters apply only to the VSA algorithm. For more information, refer to the VSA algorithm documentation.
vsa_max_iter
Defines the maximum number of iterations.
- Type:
integer
- Default:
1000
- Valid Values:
\(\geq 1\)
The algorithm stops when vsa_max_iter is reached, regardless of other
terminating conditions.
vsa_min_delta
Defines the minimum allowable change in patch proxies between successive iterations.
- Type:
real
- Default:
1.0E-6
- Valid Values:
\(\geq 0.0\)
At the end of each iteration, the new patch proxies for the next iteration are
computed and compared against the old proxies. The algorithm keeps track of the
minimum change between the old and new proxies. This change is computed as the
sum of the squares of the difference between the old and new proxy vectors. If
the minimum change in patch proxies is less than vsa_min_delta, the
algorithm stops at that iteration.
vsa_face_patch_ratio
Defines the ratio of total faces to total patches, and by extension the total number of patches.
- Type:
real
- Default:
4.0
- Valid Values:
\(\geq 1.0\)
Since the number of faces is fixed, this parameter determines the total number of patches in the final configuration:
Rather than set the number of patches explicitly, which is mesh dependent, expressing this parameter as a ratio allows the same value to apply to a variety of meshes.
vsa_max_patch_radius
Defines the desired maximum radius for a patch.
- Type:
real
- Default:
sqrt(huge(0.0_r8))- Valid Values:
\(\gt 0.0\)
This parameter is used to compute the size bias term of the weight of a face relative to a patch proxy. Refer to the size bias section of the VSA documentation for more information on how the parameter affects the face weight computation.
Note that the default value of this parameter is sqrt(huge(0.0_r8))
because it is squared in the face weight computation. By taking the root of
huge(0.0_r8) we prevent floating point overflow errors. Numerically,
the default value on the order of \(1.34\times 10^{154}\).
vsa_normalize_dist
Determines whether to normalize the distance bias.
- Type:
logical
- Default:
True
This parameter affects the computation of the distance bias term of the weight of a face relative to a patch proxy. Broadly speaking, enabling normalization tends to produce patches with a similar number of faces, regardless of the physical size of each patch. Conversely, disabling normalization tends to make all patches about the same physical size, regardless of the number of faces in each patch.
Refer to the distance bias section of the VSA documentation for more information on how the parameter affects the face weight computation.
vsa_random_seed
Defines the seed for the random number generator used to pick the initial seed patches.
- Type:
integer
- Default:
The seed is taken from the system clock.
- Valid Values:
\(\gt 0\)
The VSA algorithm uses a ‘farthest-point’ initialization method to choose the seed patches for the first iteration. To start, a random face in each connected component of the enclosure is chosen as a seed patch. Then, seed patches are added one at a time by performing a partitioning and then choosing the face with highest total distortion as the new seed patch.
This parameter sets the seed for the random number generator used to pick the first seed patch in each connected component. Therefore, runs with the same value for this parameter will produce identical results. If this parameter is not specified, then the seed is taken from the system clock and results will likely vary from run to run.
METIS Parameters (Advanced)
The METIS graph partitioning routine admits the following integer-valued options that may be specified, though all have reasonable defaults so that none must be specified. See the METIS documentation [2] for more details on these options.
metis_ptype
Specifies the partitioning method.
- Type:
integer
- Default:
0
- Valid Values:
0: Multilevel recursive bisection
1: Multilevel \(k\)-way partitioning
metis_objtype
Specifies the type of objective.
- Type:
integer
- Default:
0
- Valid Values:
0: Edge-cut minimization.
1: Total communication volume minimization.
metis_ctype
Specifies the matching scheme to be used during coarsening.
- Type:
integer
- Default:
1
- Valid Values:
0: Random matching
1: Sorted heavy-edge matching
metis_iptype
Specifies the algorithm used during initial partitioning (recursive bisection only).
- Type:
integer
- Default:
0
- Valid Values:
0: Grows a bisection using a greedy strategy
1: Computes a bisection at random followed by a refinement
2: Derives a separator from an edge cut.
3: Grow a bisection using a greedy node-based strategy
metis_niter
Specifies the number of iterations of the refinement algorithm at each stage of the uncoarsening process.
- Type:
integer
- Default:
10
- Valid Values:
\(\geq 1\)
metis_minconn
Specifies whether the partitioning procedure should seek to minimize the maximum degree of the subdomain graph. The subdomain graph is the graph in which each partition is a node, and edges connect subdomains with a shared interface.
- Type:
integer
- Default:
0
- Valid Values:
0: Does not explicitly minimize the maximum connectivity.
1: Explicitly minimize the maximum connectivity.
metis_no2hop
Specifies that the coarsening will not perform any 2–hop matchings when the standard matching approach fails to sufficiently coarsen the graph.
- Type:
integer
- Default:
1
- Valid Values:
0: Performs a 2–hop matching.
1: Does not perform a 2–hop matching.
Note
The 2–hop matching is very effective for graphs with power-law degree distributions.
metis_contig
Specifies whether the partitioning procedure should produce partitions that are contiguous. If the dual graph of the mesh is not connected this option is ignored.
- Type:
integer
- Default:
0
- Valid Values:
0: Does not force contiguous partitions.
1: Forces contiguous partitions.
metis_dbglvl
Specifies the amount and type of diagnostic information that will be written to stderr by the partitioning procedure.
- Type:
integer
- Default:
0
- Valid Values:
\(\geq 1\)
The default 0 means no output. Use 1 to write some basic information. Refer to the METIS documentation [2] for the many other possible values and the output they generate.